Research Modeling acoustic coherent communication
Abstract
Wind raises time-varying roughness on air-sea interface, which deflects underlying sound and modifies underwater acoustic channel in short timescale. Performance degradations and system failures in underwater acoustic communication were reported due to wind-induced surface waves, especially for coherent communication systems which utilize phase information during the modulation. Here, we propose a controllable numerical approach for this problem: Realistic acoustic channels for different wind conditions are numerically simulated with wind-wave spectral methods and a 2-D rough-surface parabolic equation (PE) model; Then, these time-varying acoustic channels are tested with quadrature phase-shift keying (QPSK) modulation, one of the most fundamental modulation schemes for underwater acoustic coherent communication. Preliminary results suggest that in consideration of a time-varying environment, system performance for coherent communication degrades with increasing wind speed, as a result of increasing temporal variability of windimpacted surface waves. Our numerical modeling method could be a helpful tool to study acoustic communication problems in time-varying ocean environments.
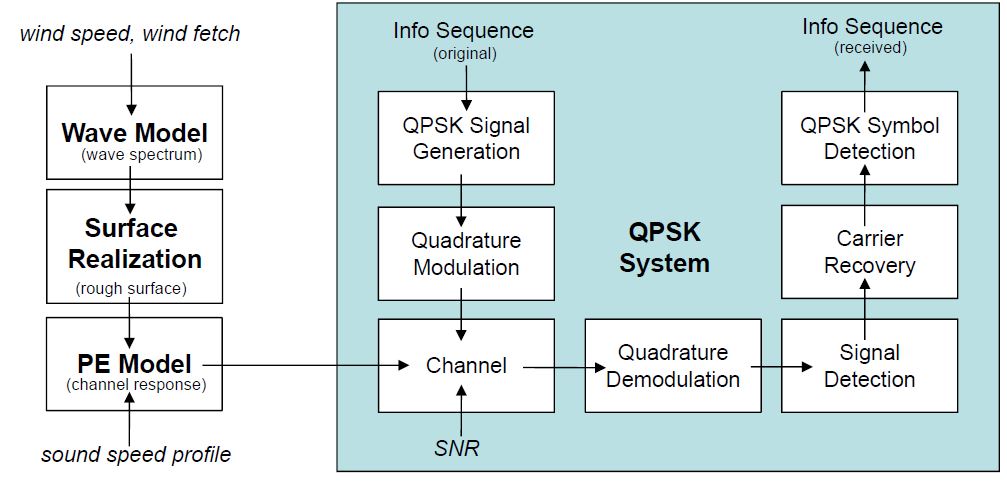
The system is comprised of a wind-impacted acoustic channel simulator and an acoustic communication system. The acoustic channel simulator transforms surface wind information into time-evovling acoustic channel impulse responses based on wind-wave-acoustics theory; Then, the acoustic communication system was tested with the acoustic channel responses. With this regime, system performance of underwater acoustic communication can be numerically simulated with adjustable environmental parameters, such as wind speed, wind fetch, water depth and ambient noise level. Several PE simulations were performed as shown below:
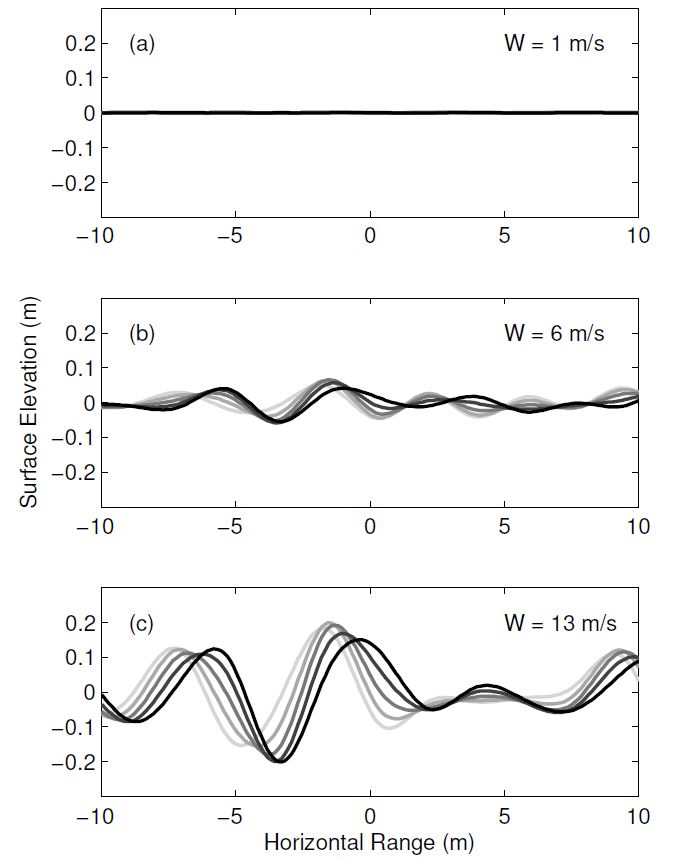
Figure 4 shows acoustic channel responses for 1 m/s and 13 m/s wind cases simulated by the 2-D rough-surface PE model. For these simulations, sound speed profile was uniform (1500 m/s), and the ocean bottom was flat. Noted that in Fig. 2, the first peak is the direct path, while the following energy componets are all surface-related acoustic paths. Results showed that the surface paths have a relative high amplitude at low winds, and also, the fluctuation in time is relative small. However, as the wind speed increases, the surface energy attenuates significantly, and the temporal fluctuation intensifies. This suggested that the multipath structure of acoustic channel have stronger variability at high winds than at low winds.
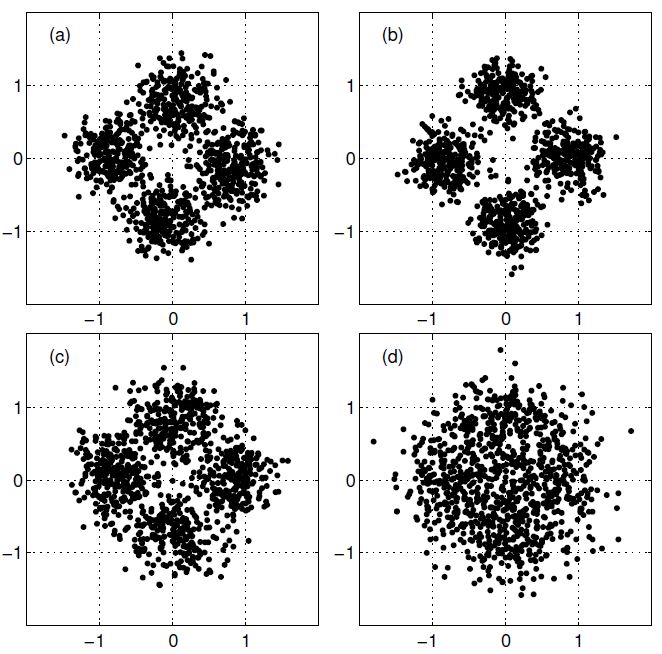
For acoustic communication, we tested two different wind speeds (1 and 13 m/s), with two different scenarios (static surface and time-evolving surface) under the SNR of 0 dB. Results in terms of demodulation constellation were shown in Fig. 3. For a static surface scenario, the high wind case has a better seperation in the constellation diagram than the low wind case [Figs. 3 (a) and (b)], suggesting that a better communication performance would be achieved at high winds, when the surface is rough but static in time. However, for a time evolving scenario, the results were totally different. For low winds, the constellations for both surface scenarios were very similar [Figs. 3 (a) and (c)], with the time-evolving case being slightly worse than the static case. For high winds, the constellations for two scenarios were completely different [Figs. 3 (b) and (d)]. The demodulation constellation for a time-evovling surface become much worse than a static surface, even both scenarios had the same roughness level. In addition, comparying Figs. 3 (c) and (d), the demodulation was worse at high wind speed than at low wind speed when the surface evovlution in time was considered.
This study presented a combined numerical modeling approach to investigate the wind-wave effects on acoustic coherent communication. With time-varying nature of ocean surface waves, the QPSK performance will decrease with increasing wind speed, due to the increasing temporal variability of surface paths at high winds, instead of the increasing roughness of the ocean surface itself. As the system performance of underwater acoustic communication is strongly related to the physical environment, which is complex and timevarying, full understanding of the time-varying environment on acoustic communication will need further work on realistic oceanography-acoustics combined models. Future study will be continued on effects of QPSK system with channel tracking, and how acoustic communication performance links with signal coherence time and water environment variability. Also, effects on other acoustic communication methods and coding schemes will be further explored.
Related publications
-
Modeling acoustic coherent communication under wind-driven ocean surface waves
Zheguang Zou; Mohsen Badiey; Xiaomei Xu. DOI: 10.1109/COA.2016.7535769. [PDF]
Related conferences
-
Preliminary estimates of year-round acoustic communications potential in the Canada Basin
Carolyn Binder, Sean Pecknold, Mohsen Badiey. DOI: 10.1121/1.5136565