
3D reconstruction of sea ice topography
People: Scott Sorensen, Stephen Rhein, Guoyu Lu, Rohith MV, Gowri Somanath, and Chandra Kambhamettu
Collaborators: Cathleen Geiger, Andy Mahoney, Hajo Eicken
PSITRES
for the latest developments on 3D reconstruction of sea ice topography check out our PISTRES camera system.
Ice Stereo
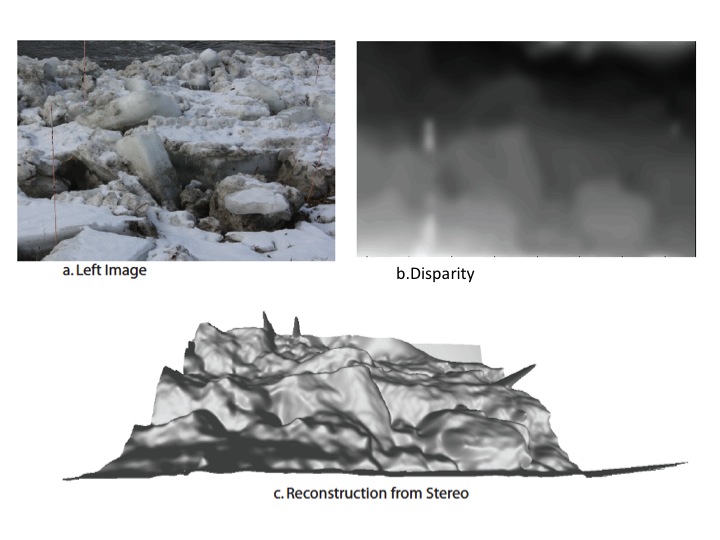
Well bounded estimates of sea ice thickness and quantification of snow cover variability are the vital ingredients for furthering our knowledge of the long term distribution and changes of the sea ice mass balance. To accomplish this, volumetric measurements of sea ice are needed based on the mapping of three interface surfaces: the air-snow surface, the snow-ice surface, and the ice-water surface. We seek specifically to address the instruments and techniques needed for an objective estimation of the variation in surface topography of an icescape. We propose to use a pair of cameras operating in the visual spectrum to obtain such samples using the principles of stereo vision. The cameras may be mounted on the side of a ship that travels through the ice, providing overlapping images of the icescape to create a swath. We undertook a field experiment to test our system in the Vermont-New Hampshire region during January 2008 and March 2009. We use a combination of custom stereo algorithms for textureless data and existing stereo algorithms to reconstruct the sea icescape. Our recent experiments with comparison of our reconstruction from laser scanned reconstructions indicate that our setup can generate models with an error of 20cm or less over a distance of 20-30 meters. Below is a reconstruction of an icescape 55 mts in depth and 17 mts in width.
The camera systems
Since the data generated through stereo analysis will complement data from other sensors, we need a method of designing a camera system with given specifications of range and error bound. We have developed systems by modeling the quantitative relationships between the camera system parameters (such as lens specifications, baseline, CCD format) and resultant 3D model parameters (such as depth range, precision). Such models can be used not only to design large scale reconstruction systems, but also near range systems useful for digitizing object geometry. We have also adapted standard calibration techniques to suit the large scale scenarios that we encounter.
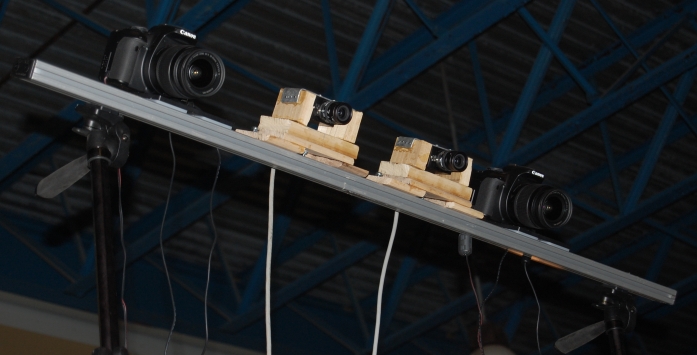
Stereo setup with DSLRs & firewire cameras.

Stereo setup with firewire cameras with 15-300mm motorized zoom lens. The cameras were mounted on Pan-Tilt units to allow computer control of vergence. This setup was used to study verify our predicted accuracy with different baseline, vergence and Field-of-view combinations. For recent experiments we have employed two 15 megapixel Canon DSLR cameras.
Data acquired
Two field trips were conducted in the Vermont-New Hampshire region during January 2008 and March 2009. During the first field trip, uncalibrated stereo imagery of the river ice was acquired. Different configurations of baseline, vergence, and exposure were tested. Some synthetic scenes created with ice-blocks was also captured. During the second field trip a calibration scheme was set in place. Fully calibrated imagery was captured using the DSLR setup with 1 meter baseline. Images of river ice before and after a break-up event were captured. For one outdoor scene with river ice blocks on the bank, simultaneous laser scans were obtained for comparison.
Software
- A pipeline for calibration and stereo reconstruction at metric scale
- An FEM based algorithm for fast interpolation of disparity from sparse correspondences
- A multi-level entropy based segmentation scheme for disparity calculation
- A region growing method for estimating disparity in large stereo images
Acknowledgements
This work was made possible by National Science Foundation (NSF) Office of Polar Program grant ANT0636726.
Related publications
- Rohith MV, Scott Sorensen, Stephen Rhein, Chandra Kambhamettu. Shape from stereo and shading by gradient constrained interpolation. Accepted into ICIP 2013 International Conference on Image Processing.
- Rohith MV, Stephen Rhein, Guoyu Lu, Scott Sorensen, Andrew R. Mahoney, Hajo Eicken, G. Carleton Ray, Chandra Kambhamettu. Iterative reconstruction of large scenes using heterogeneous feature tracking. Accepted into CVPR 2013 BDCV workshop.
- Rohith MV, Chandra Kambhamettu. Learning image structures for optimizing disparity estimation. Accepted into ACCV'10 Tenth Asian Conference on Computer Vision 2010. ( Acceptance rate 29.5%)
- Rohith MV, Gowri Somanath, Chandra Kambhamettu, Cathleen Geiger, Dave Finnegan. Modified region growing for stereo of slant and textureless surfaces. Accepted into ISVC'2010 - 6th International Symposium on Visual Computing
- Rohith MV, Gowri Somanath, Chandra Kambhamettu, Cathleen Geiger Stereo analysis of low textured regions with application towards sea-ice reconstruction. IPCV'09 - The 2009 International Conference on Image Processing, Computer Vision, and Pattern Recognition.
- Yuanjie Zheng, Stephen Lin, Chandra Kambhamettu, Jingyi Yu, Sing Bing Kang, Single-Image Vignetting Correction, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009.
- Rohith MV, Gowri Somanath, Chandra Kambhamettu, Cathleen Geiger Towards estimation of dense disparities from stereo images containing large textureless regions. In ICPR 08: Proceedings of the 19th International Conference on Pattern Recognition, 2008.
- Gowri Somanath, Rohith MV, Chandra Kambhamettu, Cathleen Geiger Reconstruction of snow and ice surfaces using multiple view vision techniques. In Proceedings of the 65th Eastern Snow Conference 2008.
See Flash based projector and Single camera stereo system for other stereo systems.