
Polar Sea-Ice Topography REconstruction System (PSITRES)
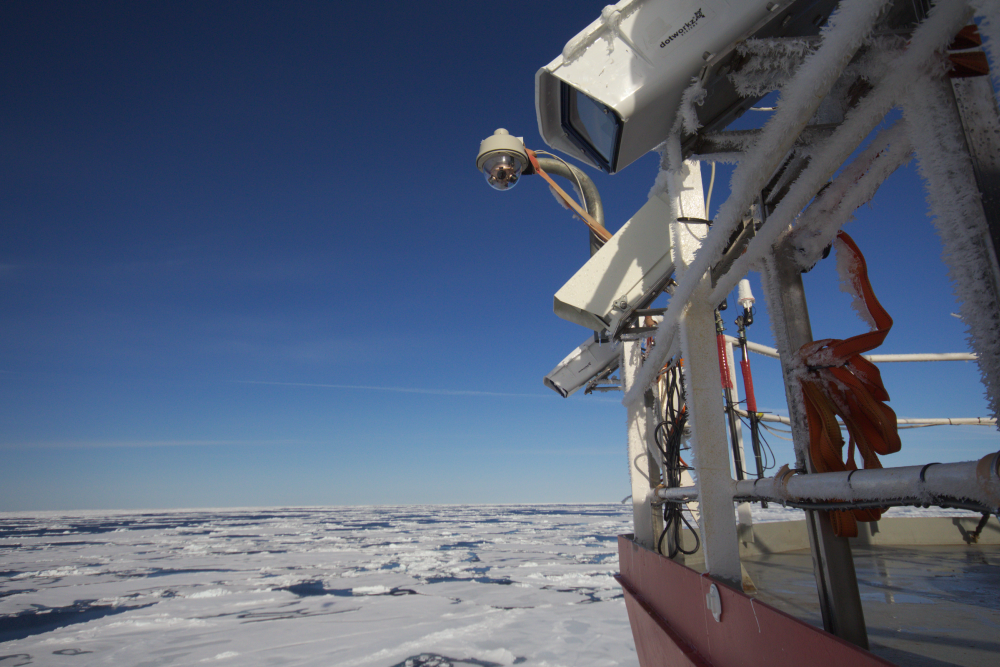
The PSITRES system aboard the Oden. Photo By Andy Mahoney.
The Polar Sea-Ice Topography REconstruction System, or PSITRES, is a 3D camera system designed and built by the University of Delaware VIMS lab. The system is built to be mounted on icebreakers to quantitatively measure sea ice. It consists of 3 cameras in weatherproof enclosures mounted on a marine grade stainless steel frame. These cameras run for days on end collecting one of a kind imagery data.
Data
Data accquired by the PSITRES camera system is availble for download, as well as derived data products. Click here
SKQ201505S
PSITRES was deployed aboard the RV Sikuliaq for its Ice trials in the Bering Sea March-April 2015. We saw a large number of walrus and are using PSITRES to map out potential habitat.

One of the many walrus seen during the cruise

The RV Sikuliaq seen from the ice
OATRC 2013
In August PSITRES was deployed aboard the Swedish icebreaker the Oden as part of the 2013 Oden Arctic Technology Research Cruise. Scott and Andy (UAF) participated as part of the marine mammal team and manned PSITRES. With new modifications in software and hardware PSITRES operated at more than 6 times the frame rate of the previous expidition, and with expert marine mammal observations we hope to classify the 3D ice terrain that makes good habitat for a variety of marine mammals.
Iceberg Ho!
The area around Northeast Greenland has some truly spectacular sights including some large icebergs (not so large by Antarctic standards). Though it was incredibly foggy, Scott captured and reconstructed one of the icebergs which the ship passed.

The iceberg
The rendered reconstruction
Arctic Beauty
After successfully completing the OATRC 2013 here are some of the amazing pictures from this summer's trip to the Arctic.

PSITRES Growing some frost flowers

A mother polar bear and her first year cubs.

A bearded seal on the ice

Some sea birds fly around an older floe.
Svalbard and Oden
In August 2013 Scott and Andy Mahoney of UAF headed to Longyearbyen to meet the Oden. Located on the Svalbard Archipelago, Longyearbyen is called the northernmost city on earth. PSITRES will be deployed for the 2013 Oden Arctic Technology Research Cruise (OATRC).

Second Cruise
PSITRES will be embarking on its second Arctic cruise in august 2013 aboard the Swedish icebreaker Oden.
Aerial SFM

Scott Captures imagery from the helicopter. Photo by Stefan Hendricks.
During the cruise SFM imagery was taken by Scott and Stefan Hendricks (AWI). The rendered 3D reconstruction is below.
TV spot
A German TV spot recently aired about the Polarstern, and it features some footage of Scott and Christian (AWI) setting up the cameras for the first time aboard the ship in Germany. link
ARK XXVII-3 Cruise
The PSITRES camera system captured stereo and SFM data of sea ice throughout the cruise. The system worked well and we are quite pleased with the initial results. There remains a large amount of processing to be completed, but updates will be posted here. Below are some pictures from the cruise.

The ship travelling in an open lead as seen from a helicopter
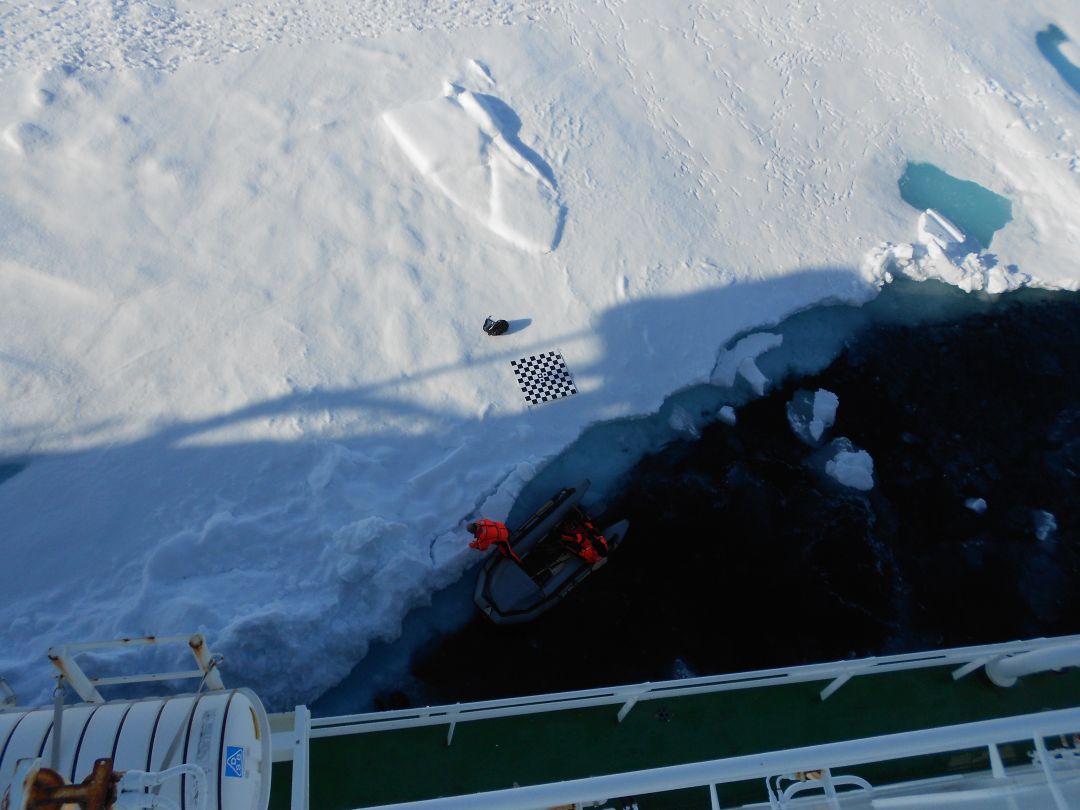
Scott calibrates the system on the ice.

Two of the polar bears seen on the cruise

The ship as seen from the first ice station
Arctic Cruise
On August 2nd 2012 Scott leaves from Troms� Norway on a 10 week expedition through the Arctic Ocean. The Psitres camera system will be making its debut, and recording the ice throughout the trip. Though communication is somewhat difficult in this environment, we hope to update this blog a few times with results, and interesting tales from the arctic. The ship can be tracked in near real time Here

Bremerhaven Germany
In June 2012 Scott went to Germany to mount and test the system on the Polarstern while it was drydocked. The system was rigged, wired, and tested aboard the actual ship. The resulting 3D reconstructions are some of the largest ever created using a stereo camera system.

Arctic field trip 1
In May 2012 we headed to Alaska to meet with Andy Mahoney of University of Alaska Fairbanks. The group went to Barrow Alaska to image some of the sea ice features that will be imaged on the longer cruise. A drone was used to capture images and video of various ice ridges.


Large scale test
The complete system was assembled on top of a parking garage here at the University of Delaware. This location offered us a reasonable approximation of the scale we would be working with on the final cruise.

Mounting System
To mount the system on the ship, we designed and built a frame system that can be affixed to the railing. The frame is constructed using marine grade stainless steel for durability. It consists of vertical elements which are connected to the guard railings of the ship, and a horizontal baseline on which the cameras are mounted. The cameras will be enclosed in sealed weather-proof heated enclosures to protect them in the harsh environment.To test the mounting framework, we built a replica of the guard railings of the Polarstern (true scale). The photographs below show the construction of the system at VIMS.




Cameras
The system will use two high resolution calibrated cameras in stereo configuration to obtain the true scale metric reconstruction. The cameras will be mounted and calibrated before the icebreaker leaves the docks. Additional calibration will be performed when icebreaker halts on ice, if necessary. The cameras will be on a wide baseline and the vergence will be adjusted to achieve the best depth resolution. The stereo cameras will be complemented by a high resolution video camera capturing monocular video of a wider swath. This data will be helpful to extend the range of reconstruction using Structure from motion algorithms.
Field trip
Our proposed system will consist of three cameras and will be tested on a real field trip to the Arctic aboard the icebreaker RV-Polarstern in the ARK-XXVII/3 expedition. The cameras will capture swath of images parallel to the track of the ship throughout the voyage. Two of the cameras will work in a stereo configuration will capture synchronous image pairs, and a single video camera will provide video for Structure from Motion (SFM) estimates of surface topography. The stereo cameras will produce reconstructions for every pair of images captured which can then be stitched together to provide a narrow swath for high accuracy surface roughness measurements. SFM videos can be analyzed to create sparse reconstructions over a wider swath width, which can be converted to real scale by using correspondences from stereo reconstructions.
Introduction
Recently, there have been attempts at quantitatively measuring aspects of icescapes using close range visual imagery as it offers a cost-effective and rapid data acquisition solution. Aspects such as ice floe characteristics, mean surface roughness, average freeboard need an estimate of accurate surface topography that is obtainable from such imagery. Currently, high-resolution 3D reconstruction of ice morphology typically uses technology such as terrestrial laser scanners. Though highly accurate, these instruments are expensive, cumbersome to operate and the data they acquire are highly time-consuming to process. We propose a system based on digital cameras which are now both cheap and ubiquitous. We will develop a self-contained, readily-deployable system that can be mounted on a variety of platforms including ships, boats aircraft or even sleds to obtain high density 3D models of ice surface topography.