
Tracking objects with hybrid multi-camera systems
People: Gowri Somanath, Rohith MV and Chandra Kambhamettu
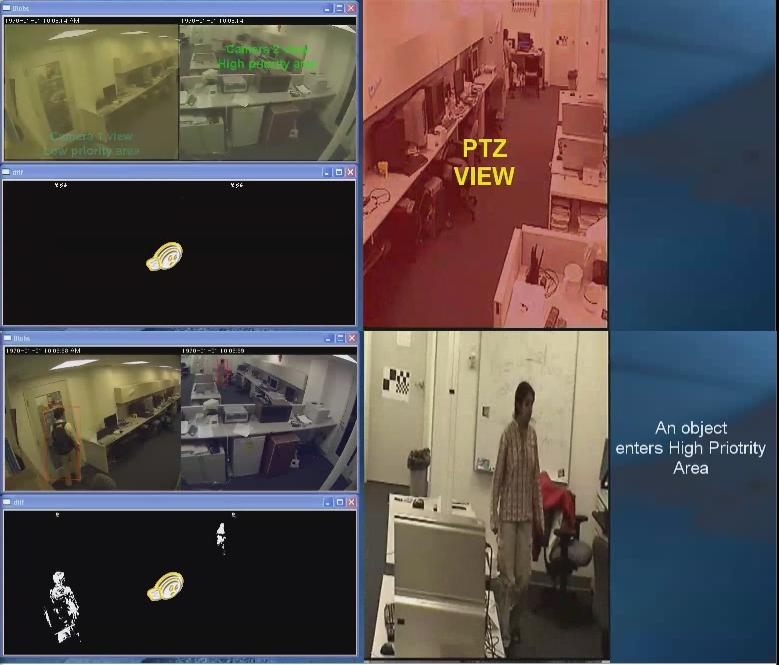
This project involved detecting regions of motion from high-field of view wireless IP cameras and controlling the Pan-Tilt-Zoon (PTZ) camera (Sony EVI-D30) to point and zoom to that region. The views from different camera were assigned priorities to resolve PTZ action. A laser based calibration was developed to map from IP camera pixel to the pan and tilt of the PTZ.
Videos
- Single IP camera. Field of view divided into different priority areas. video (~27MB)
- Two IP cameras with different priorities. video (~31MB)